Luke S. Carlson
Graduate of Northwestern University with a Bachelor of Science in Mechanical Engineering.
Based in Los Angeles, CA.
This page gives a high-level overview of my personal, research, and academic projects (non-work related).
Portfolio
Robot Thumb – View project.
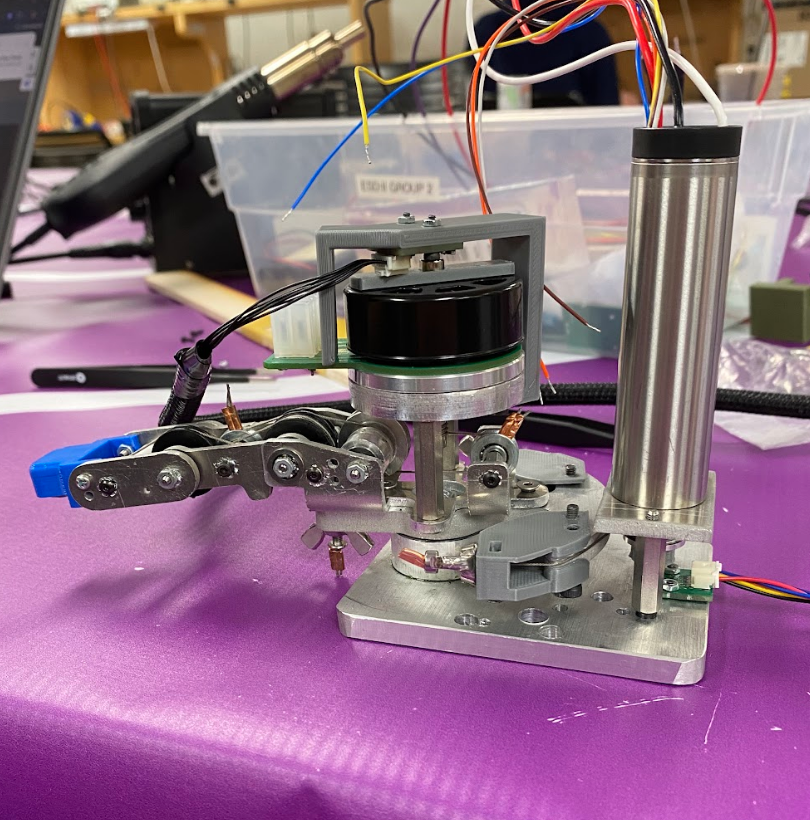
Robotics Capstone Project – Mechanical Design and Manufacturing Lead
A 6-month multi-team project to develop a robotic finger and thumb system controller by a haptic interface, allowing an operator to remotely grasp lab objects while providing tactile and force feedback. Designed and manufactured entirely in-house.
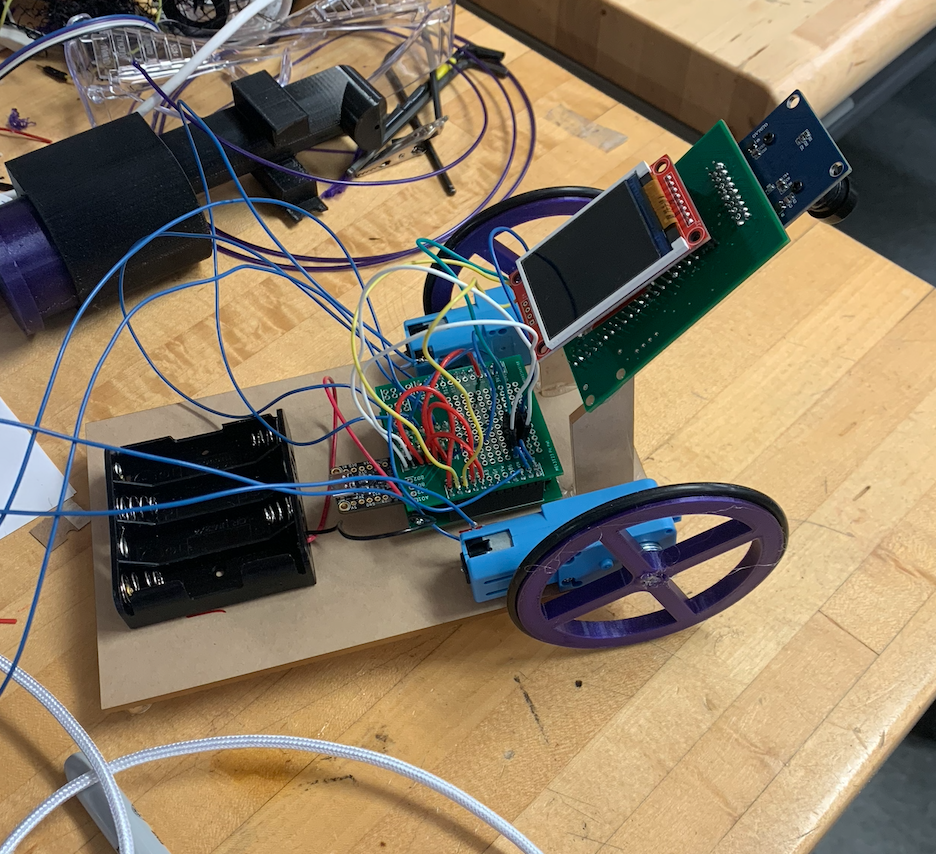
Line Following Robot – View project.
Mechatronics Project – Designer and Engineer
A mechatronics competition in which I designed and built a wheeled line following robot, utilizing a PIC32 microntroller to issue motor commands and a Raspberry Pi PICO W running an image processing program through a camera.
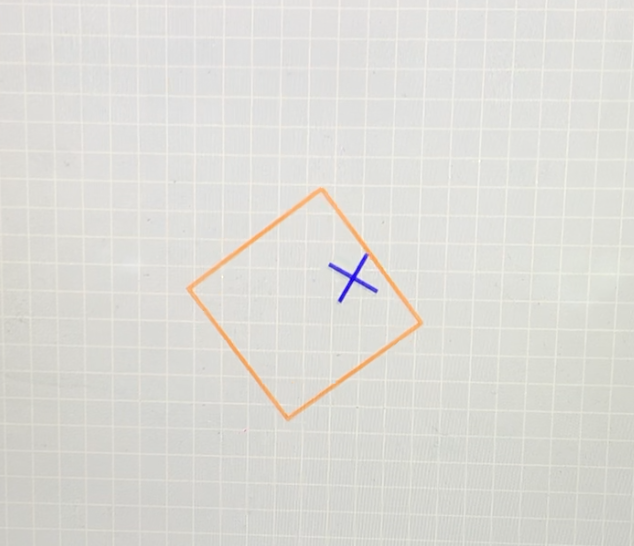
Physics Simulation – View project.
Dynamics Project – Programmer
A series of 2-dimensional physics simulations, coded in Python.
Pick and Place Machine Research – View project.
Querrey Simpson Institute for Bioelectronics – Student Researcher
As a student researcher at QSIB, a Northwestern biomedical and electronics lab, I specialized in optimizing the manufacturing of small-scale flexible electronics using a Pick and Place machine to mount SMD components.

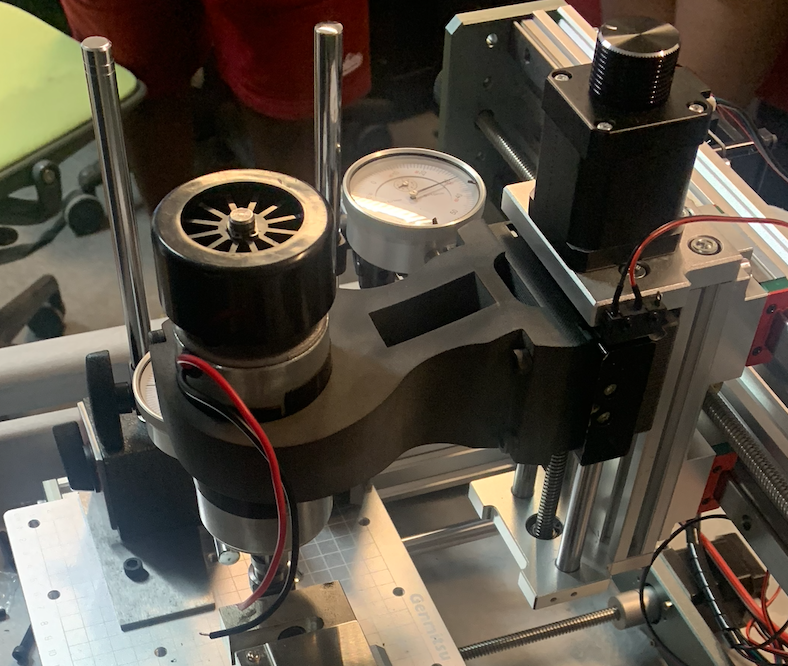
Mounting Bracket – View project.
Mechanical Design Class – Co-engineer
A quarter-long mechanical design assignment in which I and a co-engineer developed a 3D printable milling machine mounting bracket.